Radarcape:Software Features Major2
Radarcape Software Features (Major Release 2)
Since March 2017, we provide Major Release 2. Currently this page describes the differences to Radarcape:Software_Features of Major 1, which all are included in Major 2 with only minor changes, but a lot of add-ons and enhancements. Please read across Software_Features for a first overview.
Key Features
This is a brief summary of all new features.
Radarcape MLAT
- high precision location of Mode-S and ADS-B aircraft
- update rate 1/sec
- latency app. 1.5 seconds
New features within Radarcape web interface
- New responsive web design optimized for web browsers on desktop and mobile devices, filter configuration extended to hex id and track length
- Openlayers based maps
- ATC-Scope professional map style
- All maps provide filtering for serveral criterias like A/C type, altitude, registration, ICAO hex id, and more
New features within Radarcape software
- Radarcape is now able to support native piAware from FlightAware in the background as fully featured feeder and can read back MLAT results in order to display them in aircraft list, 2D and KML maps
- Aircaft location and flight data are stored and accessible separately for ADS-B, Radarcape MLAT and FlightAware MLAT
- Full performance feeder for Opensky Network
- Automatic update of flight route and base station database
- BDS register data (Extdata) free of extra charges
- Signal level available converted to dBm
Sharing groups (to come)
- Several Radarcapes can be combined into a sharing network
Support for Planeplotter Mobile
- PPm can be used to display single Radarcape or sharing groups data through local connection or connection using our MLAT server
2 Channel Radarcape
- Antenna Diversity
- Dual Antenna systems
Radarcape Video-Out
- for verification purposes, a buffered video out is available
Radarcape Multilateration Server
High precision location estimation for any Mode-S and ADS-B aircraft
- High precision MLAT results returning location, speed, track and vertical rate
- MLAT results are propagated within the private sharing group
- Very low latency: Results are returned once per second with an latency of app. 1.5sec.
- No need for ADS-B aircraft as calibration references
- High accuracy for even a single position estimation, enhanced with a highly sophisticated, adapting Kalman filter.
- MLAT results are also available for ADS-B aircraft, for example to verify their actual position or in case of spoofing
- Server/client connection is authorized and encrypted by TLS key pairs
- intrusion avoidance
- allow access control
MLAT server provides JSON, Port 30003 and JSON streaming services in the same way and format as every Radarcape
- Any software which reads Radarcape data can read a combination of several on the server
Private sharing groups
- Provides services for sharing of data from multiple Radarcape among each other and sharing group data on any web based desktop or mobile device
Web interface to the server
- Access to flight data of all connected Radarcapes including ADS-B data and BDS registers (commercial)
- Client status monitoring provided as JSON files
- XML configuration file for sharing groups
Flight data recording (commercial)
- Local server data updates on each incoming event
- Local server data latency app. 300ms
MLAT Server operational modes
- Jetvision public
- Jetvision hosted but private, closed network
- Licensed operation on a server provided by operator
Flexible hardware platform
- Written in native C++, our MLAT server can operate on any Linux platform on x86, amd64 or even ARM.
Radarcape Software Features
Sharing Groups (planned)
- A number of Radarcapes can be combined through our server forming a sharing group, e.g. for wide area supervision or local hot spot precision observation.
- Radarcape MLAT results are shared within such a Sharing Group
Fleet Watch
- Filter for specific aircraft supports either ICAO hex codes (e.g. 3c8afb) or aircraft registrations (e.g. D-AQUI)
FlightAware no compromise feed including multilateration results
- FlightAware sharing supported with no compromises
- MLAT results from FlightAware feeder can be read back into the Radarcape in addition to MLAT results from Radarcape network
Location and flight paths of different sources are stored and output separately
- ADS-B, Radarcape-MLAT, FlightAware-MLAT and Sharing Group results may be observed separately
- These data are also available within the JSON data outputs
- A new field was added to aircraftlist.json which contains the location, altitude, heading, speed and vertical rate for each of the location sources
New feeder for Opensky Network
- Opensky network feeder with no compromises
Automatic update of routes and aircraft type database
- Flightroutes database and basestation database are updated automatically (internet connection required), however manual update is still possible.
- Manual upload service for systems without internet
GPS data is provided to Chrony or NTPD
- The Radarcape becomes a stratum 1 time server
Optimized TCP streams
- In order to decrease network load, network streams became buffered
Signal level in dBm
- The signal level at the antenna connector is indicated in dBm
(note that this is not foreseen for measurement purposes)
Second-of-Day mode selectable
The value range of the second-of-day field in the GPS timestamp is selectable, the current setting is reported in status frame
- legacy mode: value range is 1…86400
- true UTC mode: value range is 0 … 86399
Status Frame 0x34 contents were extended with GPS and UTC information
- Status frames are triggered by 1PPS pulse when GPS timestamps are selected and triggered randomly in case of legacy 12MHz timestamps.
- Status frames contain a valid timestamp
- The signal level value is zero
Byte #0 of the message part contains a mirror of the FPGA switch settings. These settings have direct effect on the raw data ports 10002-10006 and indirect effect due to eventually missing or differently available data to the high level functions:
| '0' | '1' | ||
| Bit 0: | Data output mode (port 10002 only) |
Binary | AVR hexdump |
| Bit 1: | Raw data frame types | DF17 only | no pre-filtering |
| Bit 2: | Timestamps within AVR format | enabled | disabled |
| Bit 3: | not used | ||
| Bit 4: | Timestamp mode | GPS | Legacy 12MHz |
| Bit 5: | FPGA/USB handshake | disabled | enabled |
| Bit 6: | 1 bit forward error correction (FEC) |
disabled | enabled |
| Bit 7: | Mode-A/C decoding | enabled | disabled |
Byte #1 of the message part in GPS timestamp mode contains the offset of the nanosecond timer at the 1PPS event in units of 15.625ns. Normal value range is -3 … +3.
Byte #2 of the message part contains information about GPS
| '0' | '1' | ||
| Bit 0: | Antenna status | good | fail |
| Bit 1: | Tracking at least 1 satellite |
true | false |
| Bit 2: | Tracking at least 3 satellites |
true | false |
| Bit 3: | Time value base | UTC time | GPS time (8sec offset) |
| Bit 4: | unused | ||
| Bit 5: | unused | ||
| Bit 6: | unused | ||
| Bit 7: | Daysec value range | 1 ... 86400 | 0 ... 86399 |
Web Interface
New responsive web design
- Optimized for web browsers, mobile devices and tablets
Configuration and filters stored in local browser
- Viewing from different devices can have individual settings, e.g. different map styles and filters
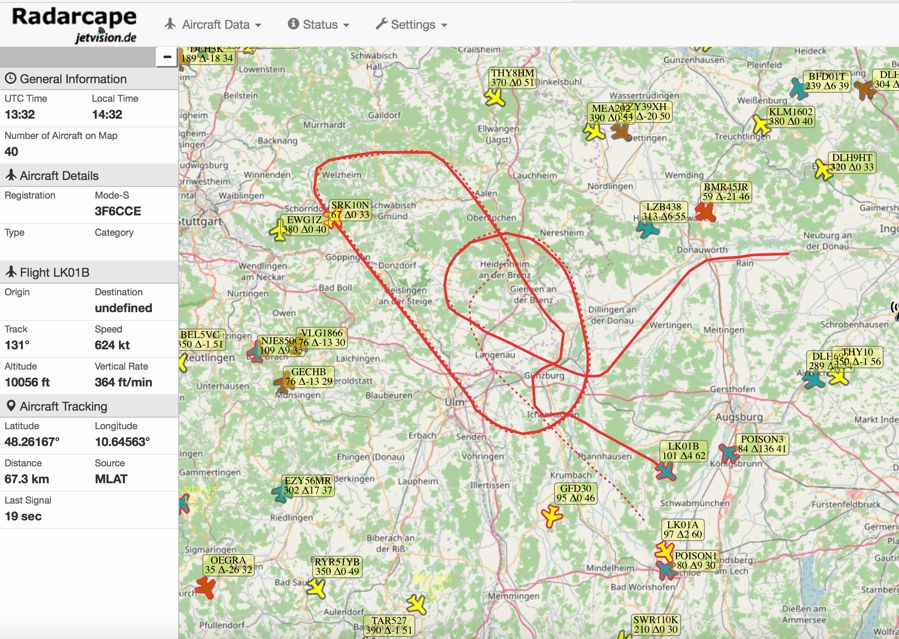
Openlayers Map introduced in parallel to Google Maps
- Supports different map styles based on gmap and Openlayers
- Border of aircraft symbols and color of tracks shows the source of data
- Black: ADS-B
- Red: Radarcape-MLAT
- Green: FlightAware
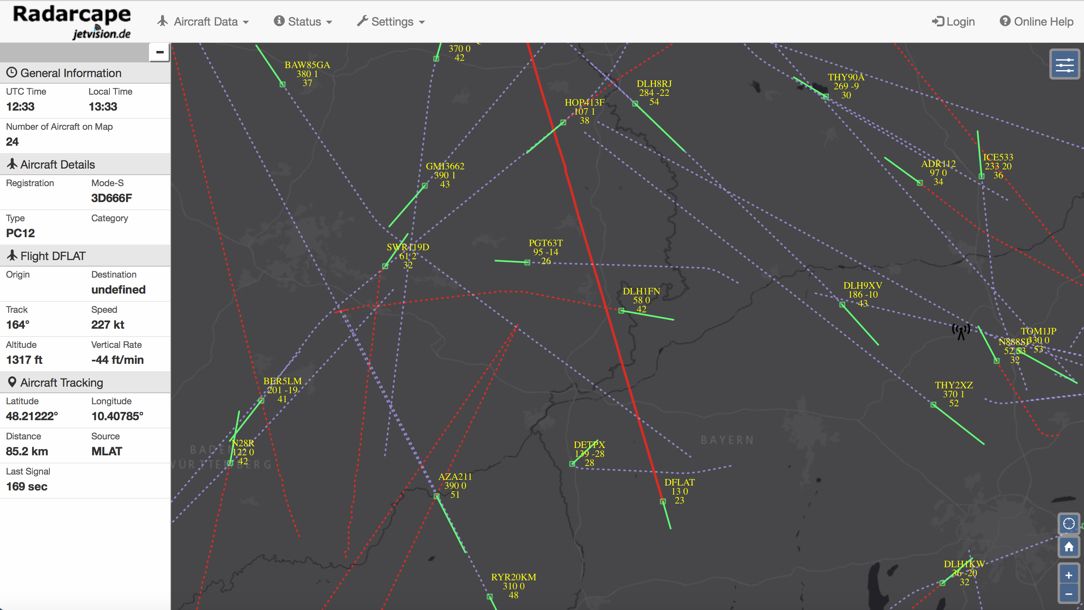
- Professional Radar map style
- providing only navigatorial data
- free of unwanted map contents
- Track and vector displayed of each aircraft
- border color is data source: black=ADS-B, red=Radarcape MLAT green=FlightAware MLAT
- fill style blue=climbing brown=ascending
Chrony and NTPD Support
Radarcape software provides interfaces for Chrony and NTPD so they can access the GPS data properly. With these, Radarcape becomes a Stratum 1 NTP standard.
Changed Output Formats
JSON files can be controlled by a number of parameters
| Name | Type | Description | aircraftlist.json | flightpath.json |
|---|---|---|---|---|
| vpn | float | View point north limit | X |
| vps || float || View point south limit | vpw || float || View point west limit | vpe || float || View point east limit |src=%c", |lookback=%ld", |tracklength=%u", |sort=%3[^?&,]s", |order=%4[^?&,]s" |altitude.from=%d |altitude.to=%d", |speed.from=%d", |speed.to=%d", |distance.from=%f |distance.to=%f", |hex.from=%u", |hex.to=%u",
aircraftlist.json
- The location, altitude, track, vrate and speed given for the aircraft in the base level follows a priority: ADS-B -> Radarcape-MLAT -> FlightAware MLAT, whichever has provided more results during the last 5 seconds
- The values of the currently three location sources (ADS-B, Radarcape-MLAT, FlightAware-MLAT) can be requested in a separate array with an additional URL parameter &select=loc. Each of them contains a field "tsz" for its track length. Base level elements "tsa" and "tsz" were removed
- Value "dbm" was added, which contains the signal level at the antenna connector in dBm. Note: This is not for measurement purposes
- The values itself are formatted as their native data type (integer, string, float). No longer for example floats as a string. Unknown values are marked as JSON 'null'
sorted_aircraftlist.json
- removed without replacement
fligthpath.json
- now outputs a JSON array with the capability to request several flight paths in one call
- used with parameter "&icao=<hex>" will return the flight path by default priority ranking ADS-B -> Radarcape-MLAT -> FlightAware MLAT, an additional parameter "&src=<char>" with char either 'a', 'm' or 'f' will select the flight path from selected location source
- parameter "&icao=<hex>" may be either repeated or either be filled with a comma separated list (e.g. <hex1, hex2>) to request several flight paths
- instead of <hex> it may also contain registratioin, this can be mixed, so for example these are valid requests: &icao=3f1234,D-AQUI or &icao=3f1234&icoa=d-aqui. Using registration requires a loaded aircraft type database and the presence of the aircraft in this database.
mapinfo.json
- contains information about own location and some more
deltadb.csv
- parameter "&loc=" was removed, own location can be read within mapinfo.json
- parameter "&lookback=<seconds>" introduced to look back for a certain amount of seconds